Key take-away:
Camera Interface Standards……………………………4 Hardware CameraLink………………………………………5 CameraLink HS………………………………….6 CoaXPress………………………………………..7 GigE Vision……………………………………….8 USB3 Vision ……………………………………..9 Comparison Table…………………………….10 Software IIDC2 …………………………………………….12 GenIcam………………………………………..13
SFNC (Standard Feature Naming Convention)
GenApi (Application Programming Interface)
GenTL (Transport Layer)
GenCP (Control Protocol)
GenDC (Data Container)
[...]
Members of the GenICam standard group maintain a reference implementation that parses the file containing
the self-description of the camera. The production quality code is written in C++, and can be used **free of charge**. It
is highly portable and available on a range of operating systems and compilers.
Comparison Table…………………………….14
Camera Performance Standards EMVA 1288 …………………………………………15
The 1288 standard is based on a linear camera model. All noise sources except for photon noise and quantization noise can
be included into a single parameter, the variance of the dark noise. Thus the model contains only three basic unknowns: the
quantum efficiency, the dark noise and the system gain.
Lens Mount Standards…………………………………16 Lighting Standards ……………………………………..17
LIR-001-2017 Laser Line Metrics for use in Machine Vision and Metrology Applications
Related articles
Questions:
Architecture overview? Brochure gives p 13 a very brief overview alternatively:
 or from Genicam Harvester
or from Genicam Harvester 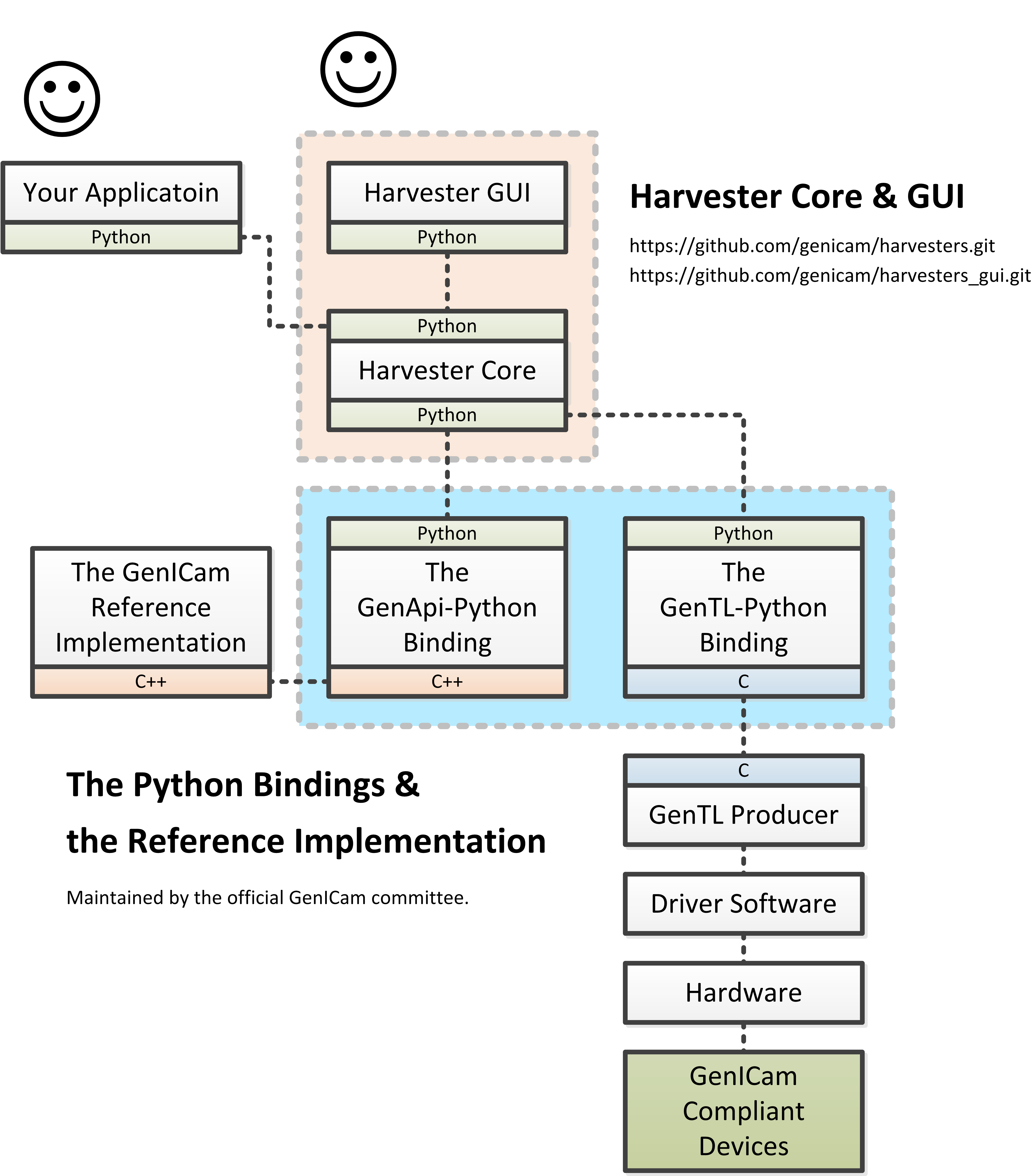
ROS Integration?